About Machine Learning ( Part 10: Reinforcement Learning )
Introduction
Reinforcement Learning (RL) is a fascinating branch of machine learning where an agent learns to interact with an environment to maximize long-term cumulative rewards. Unlike supervised learning, RL relies on feedback through interaction instead of labeled data.
The core of RL is built upon Markov Decision Processes (MDPs), which provide a mathematical framework for modeling decision-making under uncertainty.
This blog post explores the key components of RL, including value functions, Q-functions, the Bellman equation, Actor-Critic architectures, PPO, and commonly used tools in real-world RL implementations.
What is Reinforcement Learning?
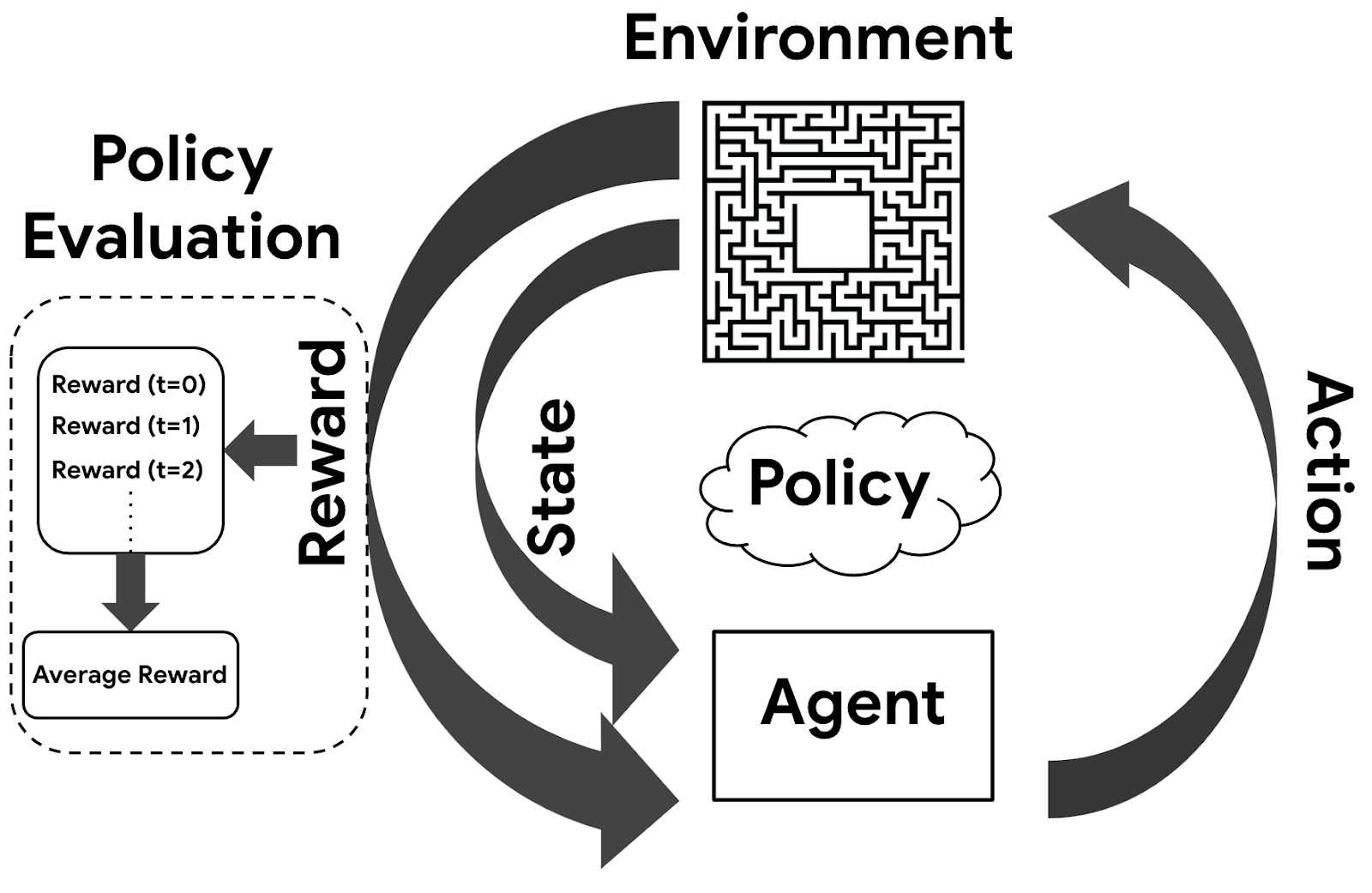
Reinforcement Learning involves an agent that:
- Observes a state $s$
- Takes an action $a$
- Receives a reward $r$
- Transitions to a new state $s’$
- Updates its policy $\pi$ to maximize long-term rewards
Key Concepts
| Term | Description |
|---|---|
| Agent | The learner or decision-maker |
| Environment | The system the agent interacts with |
| State ($s$) | The current situation |
| Action ($a$) | A decision taken by the agent |
| Reward ($r$) | A scalar feedback signal from the environment |
| Policy ($\pi$) | A strategy mapping states to actions |
| Value Function ($V(s)$) | Expected return from state $s$ |
| Q-Function ($Q(s,a)$) | Expected return from taking action $a$ in state $s$ |
Exploration vs. Exploitation
In RL, the agent must balance:
- Exploration: Trying unknown actions to learn about the environment
- Exploitation: Choosing the best-known action to maximize reward
This balance is crucial for learning an optimal policy without getting stuck in local optima.
Markov Decision Process (MDP)
An MDP formally defines an RL problem using:
- States ($S$): Set of all possible states
- Actions ($A$): Set of all possible actions
- Transition Probability ($P(s’|s,a)$): Probability of transitioning to state $s’$ from state $s$ after action $a$
- Reward Function ($R(s,a)$): Reward received when taking action $a$ in state $s$
- Discount Factor ($\gamma$): A number in $[0, 1]$ that determines how much future rewards are worth
Markov Property
An MDP assumes the Markov property:
The future is independent of the past given the present.
This means the next state depends only on the current state and action, not on the sequence of events that preceded it.
Value Function and Q-Function
State Value Function $V(s)$
The expected return starting from state $s$ and following policy $\pi$ is:
$$
V(s) = \mathbb{E} \left[ \sum_{t=0}^{\infty} \gamma^t r_t \Big| s_0 = s \right]
$$
- $r_t$: reward at time step $t$
- $\gamma$: discount factor
- $\mathbb{E}_\pi$: expectation under policy $\pi$
Action-Value Function $Q(s, a)$
The expected return from state $s$, taking action $a$, and following policy $\pi$ is:
$$
Q(s, a) = \mathbb{E} \left[ \sum_{t=0}^{\infty} \gamma^t r_t \Big| s_0 = s, a_0 = a \right]
$$
- $a_0$: action taken at $t=0$
Bellman Equation
The Bellman Equation defines a recursive relationship for value functions.
For the value function:
$$
V(s) = \max_a \left( R(s, a) + \gamma \sum_{s’} P(s’|s, a) V(s’) \right)
$$
- $R(s,a)$: immediate reward
- $P(s’|s,a)$: transition probability
- $V(s’)$: value of the next state
For the Q-function:
$$
Q(s, a) = R(s, a) + \gamma \sum_{s’} P(s’|s, a) \max_{a’} Q(s’, a’)
$$
- $Q(s’, a’)$: estimated future return of next state and action
Actor-Critic Architecture
Actor-Critic methods use:
- Actor: Chooses actions based on policy $\pi$
- Critic: Evaluates the chosen action using $V(s)$ or $Q(s,a)$
This separation helps when:
- Rewards are sparse or delayed
- The environment is complex
The Critic provides guidance, helping the Actor improve its policy more efficiently.
PPO (Proximal Policy Optimization)
PPO is a modern Actor-Critic-based policy optimization algorithm that stabilizes learning through clipped surrogate objectives.
Workflow:
- Interact with environment to collect experiences
- Compute advantage estimates
- Update Actor using a clipped objective
- Update Critic by minimizing value loss
- Repeat
PPO Objectives
1. Clipped Policy Objective:
$$
L^{CLIP}(\theta) = \mathbb{E}_t \left[ \min \left( r_t(\theta) \hat{A}_t, \text{clip}(r_t(\theta), 1 - \epsilon, 1 + \epsilon) \hat{A}_t \right) \right]
$$
- $r_t(\theta) = \frac{\pi_\theta(a_t|s_t)}{\pi_{\theta_{\text{old}}}(a_t|s_t)}$: policy ratio
- $\epsilon$: small hyperparameter controlling clip range
- $\hat{A}_t$: advantage estimate
2. Value Function Loss:
$$
L^{VF}(\theta) = \mathbb{E}_t \left[ \left( V_\theta(s_t) - \hat{R}_t \right)^2 \right]
$$
- $V_\theta(s_t)$: predicted value
- $\hat{R}_t$: actual return
3. Total Objective with Entropy Regularization:
$$
L(\theta) = L^{CLIP}(\theta) - c_1 L^{VF}(\theta) + c_2 S[\pi_\theta] (s_t)
$$
- $S\left[\pi_\theta\right] (s_t)$: policy entropy for encouraging exploration
- $c_1$, $c_2$: tuning coefficients
Why Use Advantage Instead of Raw Reward?
Using total return $\hat{R}_t$ directly to update the policy may be misleading due to:
- State quality bias: Some states are inherently good/bad regardless of the action
- High variance: Makes learning unstable
Instead, we compute the Advantage Function:
$$
\hat{A}_t = \hat{R}_t - V(s_t)
$$
- $\hat{R}_t$: estimated return from time $t$
- $V(s_t)$: critic’s estimate of state value
This tells us whether the action was better or worse than expected in a given state.
What is KL Divergence?
Kullback-Leibler (KL) Divergence measures how much one probability distribution diverges from another.
In PPO, it is used to:
- Monitor how much the new policy has changed from the old one
- Trigger early stopping or adjust learning rate if divergence is too high
GYM / Gymnasium
Gymnasium is a toolkit for building and testing RL environments.
Key Features:
env.reset(): Initialize environmentenv.step(action): Apply action and receive next state, reward, done flagenv.render(): Visualize environmentobservation_space,action_space: Define state/action formats
RL Tools & Components
Building effective reinforcement learning pipelines requires more than just algorithms — tooling is essential for stability, performance, and reproducibility. Here are some of the most important tools and components commonly used in practice:
Optuna is a powerful hyperparameter optimization library that automates tuning for better performance. It’s considered essential for finding optimal learning rates, network architectures, and other key parameters.
EvalCallback provides automated evaluation during training and saves the best-performing model. This helps avoid overfitting and ensures only the best version is deployed — an essential part of any RL workflow.
VecNormalize normalizes observations and rewards, which can significantly stabilize training, especially in environments with varying scales. It’s a crucial component for consistent performance.
CheckpointCallback periodically saves model checkpoints. This is highly recommended to prevent loss of progress and enable resuming long training sessions.
CustomCallback allows developers to inject custom logging, metric tracking, or interventions during training. It’s recommended when standard callbacks don’t meet specific needs.
SubprocVecEnv enables parallel environment execution, speeding up data collection by running multiple environment instances simultaneously. It’s particularly beneficial when using on-policy algorithms like PPO that require a lot of experience per update.
TensorBoard is a visualization toolkit that makes it easy to monitor metrics such as reward, loss, and learning rate over time. It’s widely recommended for debugging and presenting training progress.
saving and loading normalization statistics (like those from VecNormalize) is a must-have for consistency between training and inference. Without restoring these stats, the agent may perform poorly during evaluation or deployment due to mismatched input scales.
About Machine Learning ( Part 10: Reinforcement Learning )
https://kongchenglc.github.io/blog/2025/03/11/Machine-Learning-10/